
1. Tecnologia de fons
Actualment, els sistemes WIM basats en sensors de pesatge piezoelèctrics de quars s'utilitzen àmpliament en projectes com ara el control de sobrecàrregues per a ponts i embornals, l'aplicació de sobrecàrregues fora del lloc per a vehicles de càrrega per carretera i el control de sobrecàrregues tecnològics. Tanmateix, per garantir la precisió i la vida útil, aquests projectes requereixen la reconstrucció del paviment de formigó de ciment per a l'àrea d'instal·lació del sensor de pesatge de quars piezoelèctric amb el nivell de tecnologia actual. Però en alguns entorns d'aplicació, com les cobertes de ponts o les carreteres troncals urbanes amb una gran pressió de trànsit (on el temps de curat del ciment és massa llarg, cosa que dificulta el tancament de carreteres a llarg termini), aquests projectes són difícils d'implementar.
La raó per la qual els sensors de pesatge piezoelèctrics de quars no es poden instal·lar directament al paviment flexible és: Com es mostra a la figura 1, quan la roda (especialment amb una càrrega pesada) viatja sobre el paviment flexible, la superfície de la carretera tindrà una subsidència relativament gran. Tanmateix, quan s'arriba a la zona del sensor de pesatge piezoelèctric rígid de quars, les característiques de subsidència del sensor i l'àrea d'interfície del paviment són diferents. A més, el sensor de pesatge rígid no té adherència horitzontal, cosa que fa que el sensor de pesatge es trenqui ràpidament i se separi del paviment.
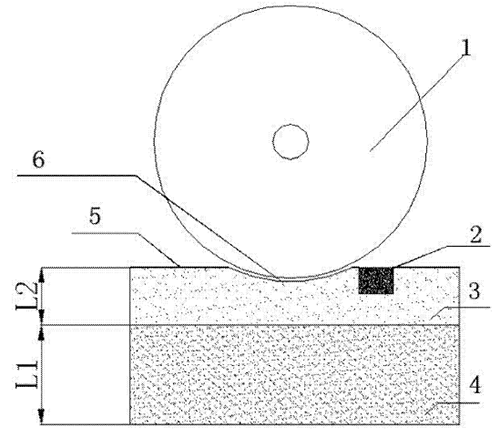
(1 roda, 2 sensors de pesatge, 3 capa base suau, 4 capa base rígida, 5 paviments flexibles, 6 zones de subsidència, 7 coixinets d'escuma)
A causa de les diferents característiques de subsidència i els diferents coeficients de fricció del paviment, els vehicles que passen pel sensor de pesatge piezoelèctric de quars experimenten vibracions severes, que afecten significativament la precisió general del pesatge. Després de la compressió del vehicle a llarg termini, el lloc és propens a danys i esquerdes, provocant danys al sensor.
2. Solució actual en aquest camp: Reconstrucció de paviments de formigó de ciment
A causa del problema que els sensors de pesatge de quars piezoelèctrics no es poden instal·lar directament al paviment d'asfalt, la mesura predominant adoptada a la indústria és la reconstrucció del paviment de formigó de ciment per a la zona d'instal·lació del sensor de pesatge de quars piezoelèctric. La longitud general de reconstrucció és de 6-24 metres, amb una amplada igual a l'amplada de la carretera.
Tot i que la reconstrucció del paviment de formigó de ciment compleix els requisits de resistència per instal·lar sensors de pesatge piezoelèctrics de quars i garanteix la vida útil, diversos problemes limiten greument la seva promoció generalitzada, concretament:
1) La reconstrucció extensiva de l'enduriment del ciment del paviment original requereix una quantitat substancial de costos de construcció.
2) La reconstrucció de formigó de ciment requereix un temps de construcció extremadament llarg. El període de curació del paviment de ciment només necessita 28 dies (requisit estàndard), provocant, sens dubte, un impacte important en l'organització del trànsit. Especialment en alguns casos en què els sistemes WIM són necessaris però el flux de trànsit in situ és extremadament alt, la construcció del projecte sovint és difícil.
3) Destrucció de l'estructura original de la carretera, afectant l'aspecte.
4) Els canvis sobtats dels coeficients de fricció poden provocar fenòmens de patinatge, especialment en condicions de pluja, que poden provocar accidents fàcilment.
5) Els canvis en l'estructura de la carretera provoquen vibracions del vehicle, que afecten la precisió del pesat fins a cert punt.
6) La reconstrucció de formigó de ciment no es pot implementar en algunes carreteres específiques, com els ponts elevats.
7) Actualment, en l'àmbit del trànsit rodat, la tendència és del blanc al negre (convertir paviment de ciment en paviment d'asfalt). La solució actual és del negre al blanc, cosa que no és coherent amb els requisits rellevants, i les unitats de construcció sovint són resistents.
3. Contingut de l'esquema d'instal·lació millorat
L'objectiu d'aquest esquema és resoldre la deficiència dels sensors de pesatge piezoelèctrics de quars que no es poden instal·lar directament sobre el paviment de formigó asfàltic.
Aquest esquema col·loca directament el sensor de pesatge de quars piezoelèctric a la capa base rígida, evitant el problema d'incompatibilitat a llarg termini causat per la incorporació directa de l'estructura del sensor rígid al paviment flexible. Això allarga molt la vida útil i assegura que la precisió del pes no es vegi afectada.
A més, no cal fer la reconstrucció del paviment de formigó de ciment al paviment d'asfalt original, estalviant una quantitat significativa de costos de construcció i escurçant molt el període de construcció, proporcionant viabilitat per a una promoció a gran escala.
La figura 2 és un diagrama esquemàtic de l'estructura amb el sensor de pesatge piezoelèctric de quars col·locat a la capa base suau.
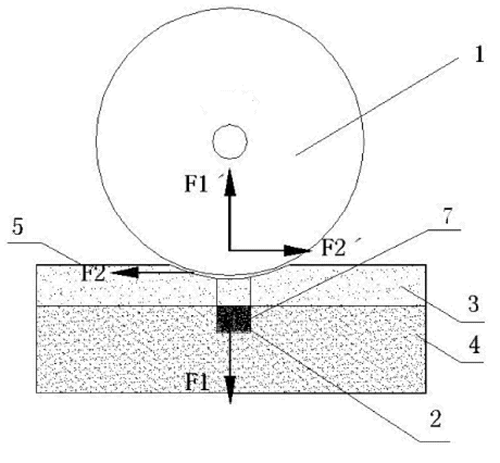
(1 roda, 2 sensors de pesatge, 3 capa base suau, 4 capa base rígida, 5 paviments flexibles, 6 zones de subsidència, 7 coixinets d'escuma)
4. Tecnologies clau:
1) Excavació de pretractament de l'estructura base per crear una ranura de reconstrucció, amb una profunditat de ranura de 24-58 cm.
2) Anivellar la part inferior de la ranura i abocar material de farciment. S'aboca una proporció fixa de sorra de quars + resina epoxi de sorra d'acer inoxidable a la part inferior de la ranura, omplert uniformement, amb una profunditat de farciment de 2-6 cm i anivellat.
3) Abocar la capa base rígida i instal·lar el sensor de pesatge. Aboqueu la capa base rígida i incrusteu-hi el sensor de pesatge, utilitzant un coixinet d'escuma (0,8-1,2 mm) per separar els costats del sensor de pesatge de la capa base rígida. Després que la capa base rígida es solidifiqui, utilitzeu una esmoladora per triturar el sensor de pesatge i la capa base rígida al mateix pla. La capa base rígida pot ser una capa base rígida, semirígida o composta.
4) Colada de la capa superficial. Utilitzeu material coherent amb la capa base flexible per abocar i omplir l'alçada restant de la ranura. Durant el procés d'abocament, utilitzeu una petita màquina compactadora per compactar lentament, assegurant el nivell general de la superfície reconstruïda amb altres superfícies de la carretera. La capa base flexible és una capa superficial d'asfalt granular mitjà-fina.
5) La relació de gruix de la capa base rígida a la capa base flexible és de 20-40: 4-18.

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Oficina de Chengdu: núm. 2004, unitat 1, edifici 2, núm. 158, carrer 4 de Tianfu, zona d'alta tecnologia, Chengdu
Oficina de Hong Kong: 8F, Cheung Wang Building, 251 San Wui Street, Hong Kong
Fàbrica: edifici 36, zona industrial de Jinjialin, ciutat de Mianyang, província de Sichuan
Hora de publicació: abril-08-2024




