
En primer lloc, la composició del sistema
1.El sistema de detecció sense parar de sobrecàrrega d'autopistes es compon generalment del sistema de recollida d'informació de sobrecàrrega del vehicle de càrrega frontal i el sistema forense i la gestió d'informació de sobrecàrrega del vehicle de càrrega posterior.
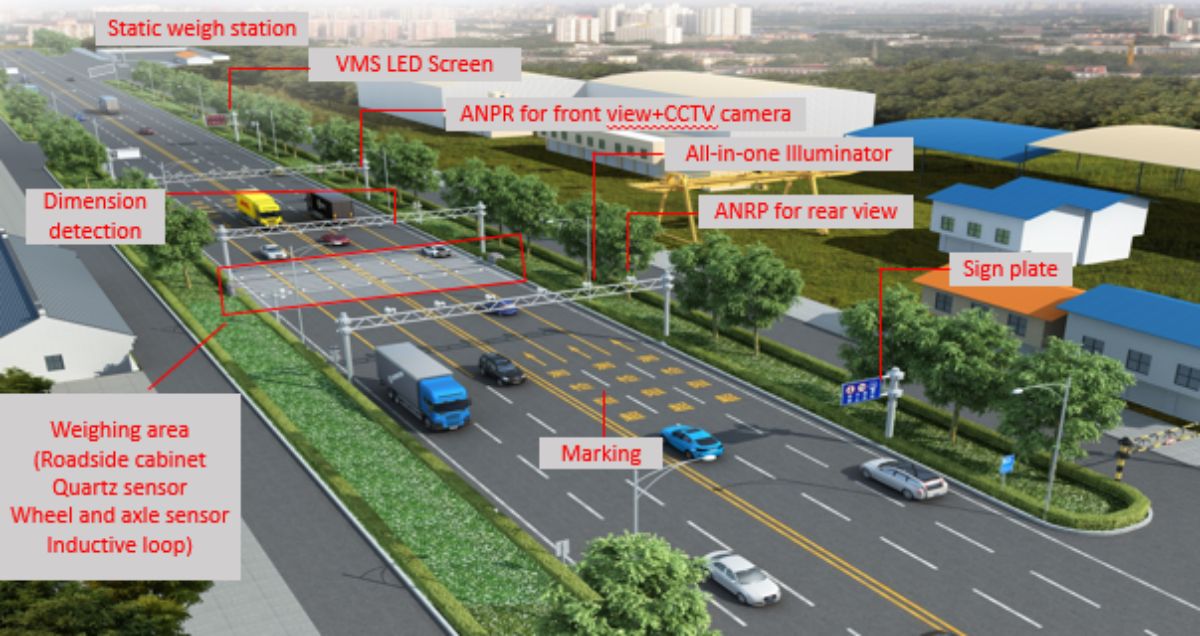
2. El sistema de recollida d'informació de sobrecàrrega de vehicles de càrrega frontal i el sistema forense generalment es compon d'equips de pesatge sense parar, equips de detecció de mida de perfils de vehicles, equips de reconeixement i captura de matrícules, detector de vehicles, equips de videovigilància, equips d'alliberament d'informació, senyals de trànsit, fonts d'alimentació i instal·lacions de protecció contra llamps, gabinets de control in situ, recollida i processament d'informació i equips de transmissió de xarxa, equips de suport i senyalització de trànsit.
3. La plataforma de gestió d'informació de sobrecàrrega de vehicles de càrrega posterior (inclosa l'aplicació directa) es compon generalment de plataformes de gestió d'informació de sobrecàrrega de comtat (districte), municipal i provincial (inclosa l'aplicació directa).
2. Requisits funcionals
1. Requisits funcionals dels equips de pesatge sense parar
1.1 Interval de velocitat de funcionament
El rang de velocitat de l'equip de pesatge sense parar és de (0,5 ~ 100) km/h perquè els vehicles de càrrega passin per l'àrea de detecció sense parar.
1.2 Nivell de precisió del pes total del vehicle
(1) L'error màxim permès de pesatge del pes total del vehicle i la càrrega dins del rang de velocitat de funcionament admissible de l'equip de pesatge sense parar no ha de ser inferior a les disposicions i requisits dels nivells de precisió 5 i 10 de la JJG 907 "Reglaments de verificació d'aparells de pesatge automàtic de vehicles dinàmics de carretera" (taula 2-1).
Taula 2-1 Error màxim permès del pes dinàmic del pes total del vehicle
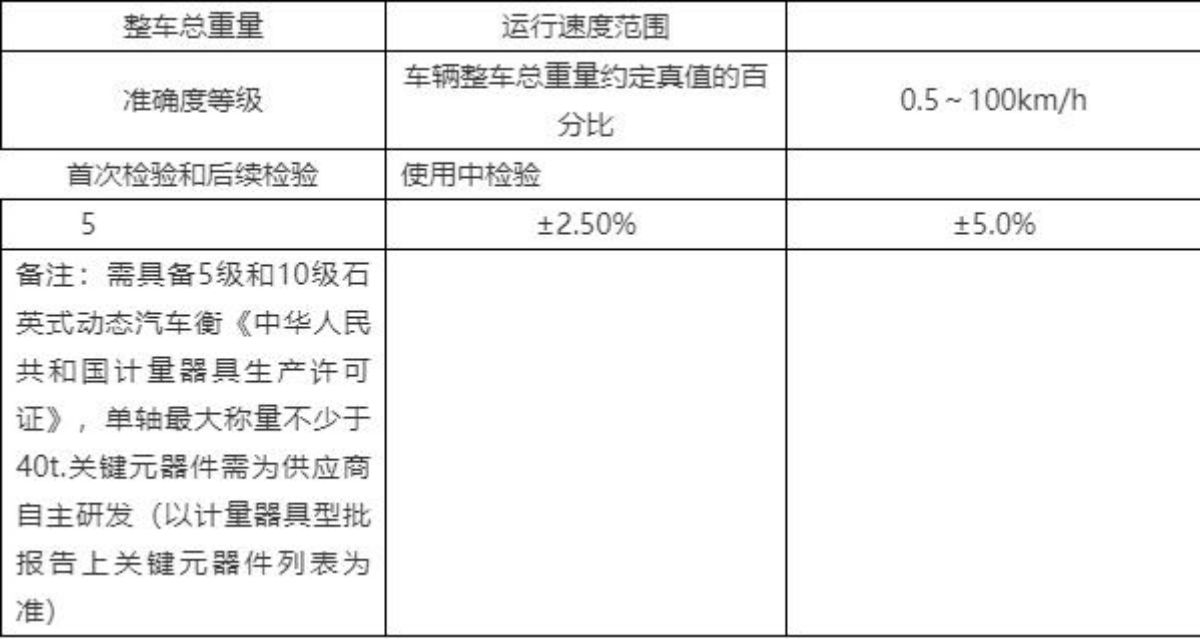
(2) Quan el vehicle de mercaderies passa per l'àrea de detecció de pesatge sense parar amb comportaments anormals de conducció, com ara acceleracions i desacceleració freqüents, bàscula de salt, aturada, corba en S, creuament, línia de pressió, conducció inversa o parada i marxa en un curt període de temps, el nivell de precisió del pes total del vehicle de l'equip de pesatge sense parar no ha de ser inferior als requisits de la taula 2-1. (Premer els carrils i conduir en sentit contrari és important).
1.3 La cèl·lula de càrrega utilitzada en l'equip de pesatge sense parar ha de complir les disposicions i els requisits de GB/T7551 "Cèl·lula de càrrega", la vida útil ha de ser ≥ 50 milions d'eixos i el nivell de protecció de la cèl·lula de càrrega utilitzada en el pesatge sense parar no ha de ser inferior a IP68. 。
1.4 El temps mitjà de treball sense problemes dels equips de pesatge sense parar no ha de ser inferior a 4000 hores, i el període de garantia dels components clau no serà inferior a 2 anys i la vida útil no serà inferior a 5 anys.
1.5 Requisits de protecció d'apagada
(1) Quan l'alimentació està apagada, l'equip de pesatge sense parar hauria de ser capaç d'emmagatzemar automàticament els paràmetres i la informació de pesatge establerts actualment, i el temps d'emmagatzematge no hauria de ser inferior a 72 h.
(2) En cas de fallada de corrent, el temps de funcionament del rellotge intern de l'equip de pesatge sense parar no ha de ser inferior a 72 d.
1.6 Requisits de tractament anticorrosió
Les peces metàl·liques exposades dels equips de pesatge sense parar s'han de tractar amb tractament anticorrosió d'acord amb les disposicions pertinents de GB/T18226 "Condicions tècniques per a la anticorrosió de components d'acer en enginyeria de trànsit de carreteres".
1.7 L'error de mesura de velocitat del detector de vehicles de l'equip de pesatge sense parar ha de ser ≤± 1 km/h i la precisió de la detecció del flux de trànsit ha de ser ≥99%.
1.8 Els requisits tècnics dels separadors de vehicles per a equips de pesatge sense parar són els següents:
(1) La precisió de detecció del nombre d'eixos ha de ser ≥98%.
(2) L'error de detecció de l'espaiat de l'eix ha de ser ≤± 10 cm.
(3) La precisió de la classificació del vehicle ha de ser ≥ 95%.
(4) La taxa de reconeixement entre canals hauria de ser ≥98%.
1.9 L'interval aplicable de temperatura de l'entorn de treball ha de complir -20 ° C ~ + 80 ° C, i els indicadors tècnics de resistència a la humitat ambiental han de complir les regulacions i requisits pertinents dels equips mecànics i elèctrics exteriors de JT/T817 "Requisits tècnics generals i mètodes de prova per a equips de sistemes electromecànics d'autopistes".
1.10 S'han de prendre mesures a prova de pluja i pols i el nivell de protecció ha de complir les disposicions i els requisits de JT/T817.

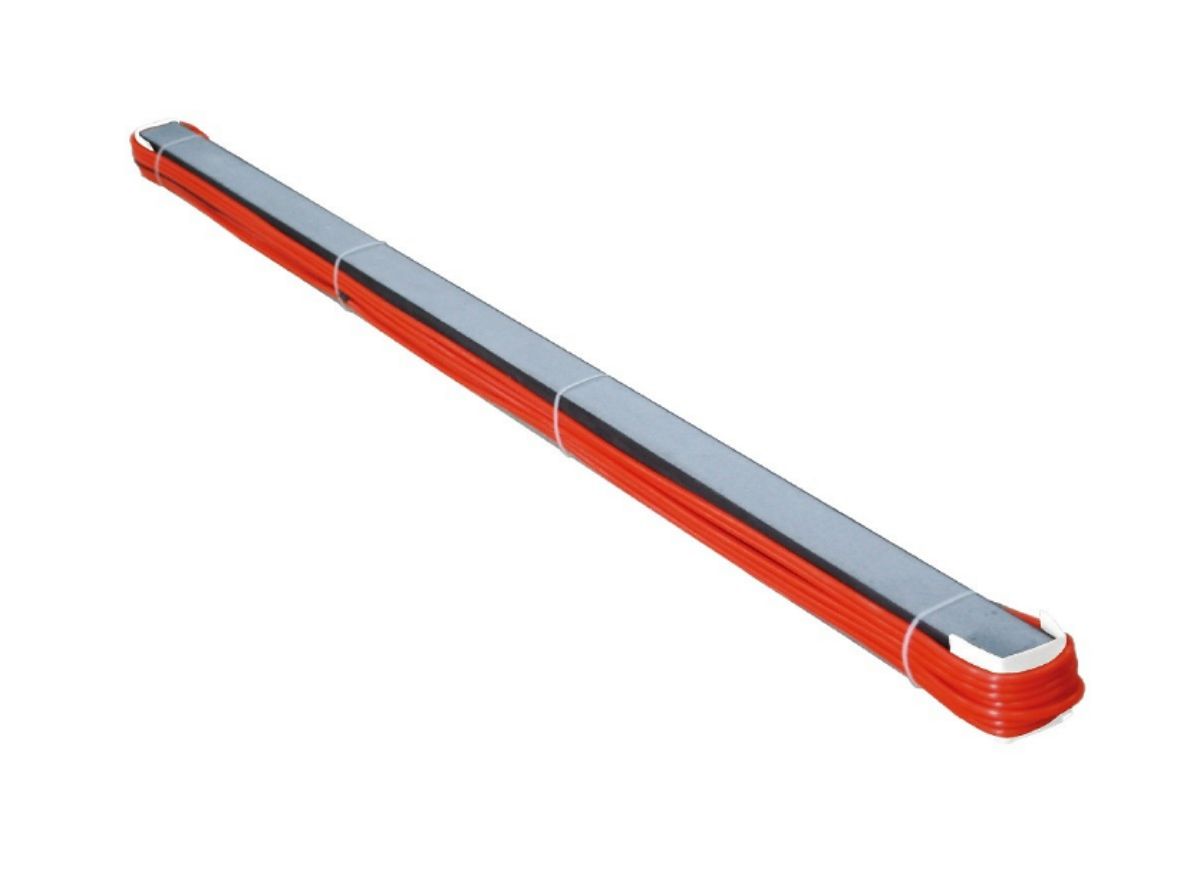
2. Requisits funcionals dels equips de prova de mida del perfil del vehicle
2.1 Quan el vehicle de càrrega passa per l'àrea de detecció de pesatge sense parar a una velocitat de (0,5 ~ 100) km/h, hauria de ser capaç de completar automàticament la detecció ràpida en temps real de les dimensions geomètriques i el model 3D de la longitud, amplada i alçada del vehicle de càrrega, i produir els resultats d'identificació correctes. El temps de resposta no ha de ser inferior a 30 ms i el temps per completar un únic resultat de detecció i sortida no ha de ser superior a 5 s.
2.2 El rang de mesura geomètrica de la longitud, l'amplada i l'alçada del vehicle de càrrega ha de complir els requisits de la taula 2-2.
Taula 2-2 Interval de mesura de l'equip de prova de mida del perfil del vehicle
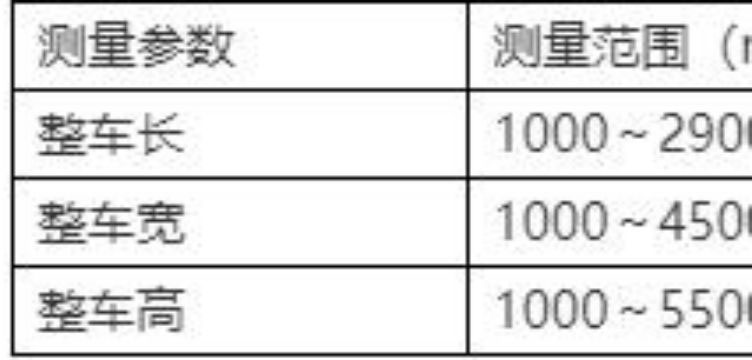
2.3 La resolució de mesura de la dimensió geomètrica de la longitud, l'amplada i l'alçada del vehicle de càrrega no és superior a 1 mm, i l'error de mesura de l'equip de detecció de la mida del contorn del vehicle ha de complir els requisits següents dins del rang d'1 ~ 100 km/velocitat de funcionament normal: (en termes de velocitat de marxa, hauria de ser coherent amb els requisits de l'equip de pesatge dinàmic anterior).
(1) Error de longitud≤±500 mm;
(2) Error d'amplada ≤±100 mm;
(3) L'error d'alçada ≤± 50 mm.
2.4 La freqüència de detecció de punts làser dels equips de prova de la mida del perfil del vehicle hauria de ser ≥1kHz i hauria de tenir 9 tipus de models de vehicles i funcions de detecció de velocitat del vehicle especificades al vehicle de motor GB1589 "Mida del esquema, càrrega per eix i límits de qualitat d'automòbils, remolcs i trens d'automòbils".
2.5 Hauria de tenir les funcions de vehicles de càrrega paral·lels, judici d'estat de conducció S-bend, blindatge de material negre i detecció de mida geomètrica del perfil del vehicle de càrrega de material d'alta reflectivitat.
2.6 hauria de tenir la classificació dels models de vehicles de motor de mercaderies, volum de trànsit, velocitat d'ubicació, distància de temps frontal, seguint el percentatge del cotxe, espai frontal, funcions de detecció d'ocupació temporal. I la precisió de classificació dels models de vehicles de motor de càrrega hauria de ser ≥ 95%.
2.7 L'interval aplicable de temperatura de l'entorn de treball ha de complir -20 °C ~ +55 °C, i els indicadors tècnics de resistència a la humitat ambiental han de complir les regulacions i requisits pertinents dels equips mecànics i elèctrics exteriors de JT/T817 "Requisits tècnics generals i mètodes de prova per a equips de sistemes electromecànics d'autopistes".
2.8 Els equips de prova de mida del perfil del vehicle làser s'han d'instal·lar amb un pòrtic amb un canal de manteniment
2.9 El nivell de protecció de l'equip de prova de mida del perfil del vehicle no ha de ser inferior a IP67.
3. Requisits funcionals dels equips de reconeixement i captura de matrícules
3.1 Els requisits funcionals dels equips de reconeixement i captura de matrícules han de complir les disposicions i els requisits pertinents del GB/T 28649 "Sistema d'identificació automàtica per a les plaques de número de vehicles de motor".
3.2 L'equip de reconeixement i captura de matrícules ha d'estar equipat amb una llum de farciment o una llum intermitent, que ha de ser capaç de captar clarament el número de vehicle que passa per l'àrea de detecció de pesatge sense parar sota qualsevol condició meteorològica i donar el resultat d'identificació correcte.
3.3 L'equip de reconeixement i captura de matrícules hauria de ser ≥ 99% de precisió de reconeixement de matrícules durant el dia i ≥95% de precisió del reconeixement de matrícules a la nit, i el temps de reconeixement no hauria de ser superior a 300 ms.
3.4 La imatge de la matrícula del vehicle de càrrega recollida s'ha de mostrar clarament en format JPG d'amplada completa i el resultat del reconeixement ha d'incloure el temps de reconeixement, el color de la matrícula, etc.
3.5 Els píxels d'imatge de captura de reconeixement de matrícules no han de ser inferiors a 5 milions, els altres píxels d'imatge de captura no han de ser inferiors a 3 milions, els vehicles de càrrega a través de l'àrea de detecció de pesatge sense parar, han de capturar la part davantera del vehicle, els dos costats del vehicle i la part posterior del vehicle un total de no menys de 4 imatges d'alta definició.
3.6 Segons la informació de la imatge frontal d'alta definició, l'àrea de la matrícula del vehicle de càrrega, les característiques frontals i de la cabina, el color frontal, etc., haurien de poder distingir clarament el nombre d'eixos, el color de la carrosseria i la situació bàsica de les mercaderies transportades segons la informació de la imatge d'alta definició al costat del vehicle; segons la informació d'imatge d'alta definició de la part posterior del vehicle, es pot distingir el número de la matrícula de la cua, el color de la carrosseria i altres informacions.
3.7 Cada imatge s'ha de sobreposar amb informació com ara la data de detecció, l'hora de la prova, la ubicació de la prova, el pes total del vehicle i de la càrrega, les dimensions del vehicle, el número d'equips forenses d'imatge, la lluita contra la falsificació i altra informació.
3.8 L'ample de banda del canal de transmissió d'informació d'imatge capturada no ha de ser inferior a 10 Mbps.
3.9 Hauria de tenir funcions d'autocomprovació d'errors, com ara una comunicació anormal i una fallada de corrent.
3.10 L'interval aplicable de temperatura de l'entorn de treball ha de complir -20 °C ~ +55 °C, i els indicadors tècnics de resistència a la humitat ambiental han de complir les regulacions i els requisits pertinents dels equips mecànics i elèctrics exteriors de JT/T817 "Requisits tècnics generals i mètodes de prova per a equips de sistemes electromecànics d'autopistes".
3.11 El nivell de protecció dels equips de reconeixement i captura de matrícules no ha de ser inferior a IP67.
4 Requisits funcionals dels equips de videovigilància
La càmera de videovigilància 4.1 hauria de tenir una funció de càmera infraroja de dia i nit, i hauria de poder pesar sense parar l'àrea de detecció de la funció de càmera integral i estalviar no menys de 10 segons de dades de vídeo de recollida d'evidència de sobrecàrrega de vehicles de càrrega il·legal.
4.2 Ha de tenir les funcions d'autodiagnòstic, calibratge del camp de visió i compensació automàtica.
4.3 Les imatges de vídeo forense no han de tenir menys de 3 milions de píxels i han de ser clares i estables.
4.4 Hauria de tenir la funció de rotació i zoom, i la rotació horitzontal i vertical i el zoom de la lent es poden dur a terme segons l'ordre de control.
4.5 Ha de tenir la funció de netejar i eliminar els llums antiboira de pluja i gelades, i hauria de poder netejar, escalfar i descongelar la coberta protectora a temps.
4.6 Les imatges de vídeo forense s'han de transmetre a la plataforma de gestió d'informació de sobrecàrrega a nivell de comtat (ciutat) i d'aplicació directa en temps real.
4.7 Els equips de videovigilància i altres indicadors tècnics dels seus accessoris han de complir les disposicions i requisits pertinents de GA/T995.
4.8 L'interval aplicable de temperatura de l'entorn de treball ha de complir -20 ° C ~ + 55 ° C, i els indicadors tècnics de resistència a la humitat ambiental han de complir amb les regulacions i requisits pertinents dels equips mecànics i elèctrics exteriors de JT/T817 "Requisits tècnics generals i mètodes de prova per a equips de sistemes electromecànics d'autopistes".
5 Requisits funcionals dels equips de publicació d'informació
5.1 Hauria de ser capaç de lliurar informació en temps real sobre la sobrecàrrega del vehicle al conductor del vehicle il·legal de sobrecàrrega.
5.2 Hauria de poder publicar i mostrar informació com l'alternança de text i el desplaçament.
5.3 Els principals indicadors funcionals i indicadors tècnics dels rètols d'informació variable LED de carretera han de complir les disposicions i requisits pertinents de GB/T23828 "Signal d'informació variable LED de carretera".
5.4 Es pot seleccionar la pantalla de visualització de senyals d'informació variable d'autopista tipus pòrtic de dues columnes que s'utilitza habitualment: es pot seleccionar l'espai entre píxels: 10 mm, 16 mm i 25 mm. La mida de l'àrea de visualització de quatre carrils i sis carrils pot ser de 10 metres quadrats i 14 metres quadrats, respectivament. El format de contingut de visualització pot ser d'1 fila i 14 columnes.
5.5 Es pot seleccionar l'espaiat de píxels de la pantalla de senyal d'informació variable LED d'una sola columna: 10 mm, 16 mm i 25 mm. La mida de la pantalla es pot seleccionar entre 6 metres quadrats i 11 metres quadrats. El format de contingut de visualització pot ser de 4 files i 9 columnes.
5.6 El disseny i la configuració dels senyals d'informació variable LED d'autopista i la distància de reconeixement visual haurien de tenir en compte plenament les necessitats reals de velocitat i reconeixement visual dels vehicles de càrrega a la secció de la carretera i complir amb les disposicions i requisits pertinents de GB/T23828 "Signal d'informació variable LED de carretera".
6 Requisits de configuració de senyals de trànsit
6.1 Instal·leu un senyal de trànsit per entrar a la "zona de pesatge i detecció sense parar" a una distància no inferior a 200 metres davant de la zona de detecció de pesatge sense parar.
6.2 Instal·lar un senyal de trànsit "no canvi de carril" a no menys de 150 metres davant de l'àrea de detecció de pesatge sense parar.
6.3 Instal·lar un senyal de trànsit de "Aixeca la prohibició de canvi de carril" a una distància no inferior a 200 metres darrere de la zona de detecció de pesatge sense parar.
6.4 La col·locació dels senyals de trànsit a l'àrea de detecció de pesatge sense parar ha de complir amb el disseny i els requisits de GB5768 "Senseyals i marques de trànsit".
7. Requisits dels equips d'alimentació i de la presa de terra de protecció contra llamps
7.1 El sistema de recollida d'informació de sobrecàrrega i forense ha d'estar equipat amb línies d'alimentació estables i fiables, que han de poder complir els requisits d'un funcionament ininterromput de 24 hores d'alimentació.
7.2 S'han d'adoptar les mesures necessàries de protecció contra llamps i sobretensió per a la interfície d'alimentació i la interfície de control del sistema de recollida d'informació sobre sobrecàrregues i els components relacionats, i les mesures de protecció han de complir amb les disposicions i requisits pertinents de JT/T817 "Requisits tècnics generals i mètodes de prova per a equips de sistemes electromecànics d'autopistes".
7.3 El sistema de recollida d'informació de sobrecàrrega i forense hauria d'adoptar un mètode de connexió a terra propera d'un sol punt, i s'hauria d'adoptar el mètode de connexió a terra paral·lel de CC.
7.4 La protecció contra llamps i la resistència elèctrica de l'equip de recollida d'informació de sobrecàrrega i d'equips forenses han de ser ≤ 10 Ω, i la resistència de protecció de terra ha de ser ≤ 4 Ω.
8 Requisits funcionals de l'armari de control de camp

8.1 El gabinet de control in situ configurat amb el sistema de recollida d'informació de sobrecàrrega i forense ha de ser capaç d'emmagatzemar processadors d'adquisició de dades, detectors de vehicles, commutadors de xarxa i altres equips. Hauria de poder carregar la informació de sobrecàrrega del camió a la plataforma d'aplicació directa administrativa de trànsit del departament provincial del centre d'informació de transport i poder transmetre la informació de sobrecàrrega del camió al senyal d'informació variable LED de la carretera en temps real per alliberar-lo i mostrar-lo.
8.2 L'armari de control s'ha de dissenyar amb un segell de xassís de doble capa, que pot prevenir eficaçment la pols i la pluja, i té un sistema de control de temperatura independent.
8.3 L'armari de control s'ha de dissenyar amb ranures per facilitar l'expansió de la funció.
8.4 L'armari de control ha d'estar equipat amb equips de protecció de seguretat de dades per evitar la fuita de dades de detecció de límits.
9. Requisits per a la instal·lació de zones de pesatge sense parar per sobrecàrrega d'autopistes
9.1 L'àrea de detecció de pesatge sense parar està formada pel suport de l'equip de pesatge sense parar (sensor de cristall de quars) i les seves seccions de guia als extrems davanter i posterior (segons la superfície de la carretera endurida de 30 metres per davant i 15 metres per darrere) (Figura 2-1).

Figura 2-1 Esquema de la zona de pesatge sense parar
9.2 La ubicació de l'àrea de pesatge i proves sense parar no s'ha de situar en un pla, el radi de la corba longitudinal és petit, la distància de visió és pobra i la llarga baixada i altres trams de carretera, i els indicadors lineals haurien de complir amb l'ASTM E1318 "Especificació estàndard per a sistemes de pesatge en moviment (WIM) i sistemes de prova d'usuaris". Mètodes, els requisits específics són els següents:
(1) El radi de gir de la línia central de la carretera de la secció de guia de 60 m i la secció de carretera de guia posterior de 30 m a l'àrea de detecció de pesatge sense parar ha de ser ≥ 1,7 km.
(2) El pendent longitudinal de la superfície de la carretera a la secció de guia davantera de 60 m i la secció de carretera de guia posterior de 30 m a l'àrea de detecció de pesatge sense parar hauria de ser ≤2%.
(3) El valor de pendent transversal del paviment i de la secció de carretera guia davantera de 60 m i la secció de carretera guia de 30 m posterior de l'àrea de detecció de pesatge sense parar hauria de complir l'1% ≤ i ≤2%.
(4) No hi hauria d'haver cap obstacle que bloquegi la línia de visió del conductor dins del tram de carretera guia de 150 m abans de l'àrea de detecció de pesatge sense parar.
(5) La distància entre la ubicació de l'àrea de pesatge i detecció sense parar i l'entrada i sortida del túnel de la carretera en el mateix tram de carretera no ha de ser inferior a 2 km i no serà inferior a 1 km.
(6) L'error horitzontal de la connexió entre el sensor i la superfície de la carretera no és superior a 0,1 mm
9.3 Per tal de garantir la precisió de les dades de pesatge sense parar i la seguretat de la conducció, l'aïllament del carril de la secció de la carretera de guia davantera de 60 m i la secció de la carretera de guia posterior de 30 m de l'àrea de detecció de pesatge sense parar s'han d'aïllar mitjançant una línia sòlida.
9.4 Zona de pesatge i assaig sense parar per guiar la construcció de trams de carretera
(1) El llit de la carretera de la secció de la carretera ha de ser estable i el coeficient de fricció del paviment ha de complir els requisits de disseny de la secció de la carretera.
(2) La superfície del paviment de la secció de la carretera guia ha de ser llisa i compacta, i el paviment asfàltic no hauria de tenir roderes, forats, enfonsament, congestió, esquerdes, esquerdes de xarxa i protuberàncies, i el paviment de ciment no hauria de tenir plaques esglaonades, trencades, enfonsament, acumulació de fang i altres malalties. La planitud del paviment de formigó de ciment i el paviment de formigó asfàltic ha de complir les disposicions i els requisits pertinents de JTGF80-1 "Normes d'avaluació i inspecció de qualitat d'enginyeria de carreteres".
(3) L'amplada de la superfície de la carretera de la secció de la carretera guia ha de ser capaç de suportar el pas normal del vehicle de càrrega més ample dins del rang de pesatge.
(4) La línia central del paviment a l'àrea de pesatge i proves sense parar s'ha d'aïllar per línies sòlides grogues dobles (groc simple) i la línia de demarcació del carril s'ha d'aïllar per línies sòlides blanques.
3. Requisits de protocol d'interfície i format de dades
El protocol d'interfície i el format de dades del sistema de detecció continua de sobrecàrrega d'autopistes haurien de complir les disposicions i els requisits pertinents del "Pla de disseny d'enginyeria d'aplicació directa administrativa integral del trànsit de Fujian" per garantir la interconnexió i l'intercanvi d'informació entre les plataformes de gestió d'informació de sobrecàrrega del comtat (districte), municipal i provincial (inclosa l'aplicació directa).

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Oficina de Chengdu: núm. 2004, unitat 1, edifici 2, núm. 158, carrer 4 de Tianfu, zona d'alta tecnologia, Chengdu
Oficina de Hong Kong: 8F, Cheung Wang Building, 251 San Wui Street, Hong Kong
Fàbrica: edifici 36, zona industrial de Jinjialin, ciutat de Mianyang, província de Sichuan
Hora de publicació: 25-gen-2024




